Divisão Driverless
Desenvolve os algoritmos de percepção, estimativa e controle para navegação autônoma.
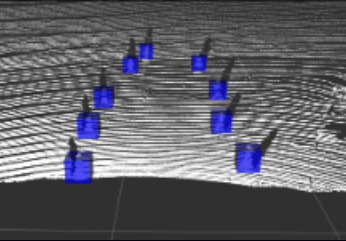
Percepção (Perception)
Divisão responsável pelo sensoriamento do ambiente, utilizando inteligência artificial para identificar os pontos chaves , como os cones que delimitam a pista, necessários para a locomoção. O sistema utiliza uma câmera ZED 2i e redes neurais YOLO para classificar objetos e gerar mapas de profundidade, permitindo estimar a posição 3D desses pontos em tempo real. Atualmente, a equipe trabalha na integração de sensores LiDAR para aumentar a precisão da detecção por meio de pulsos de luz laser.
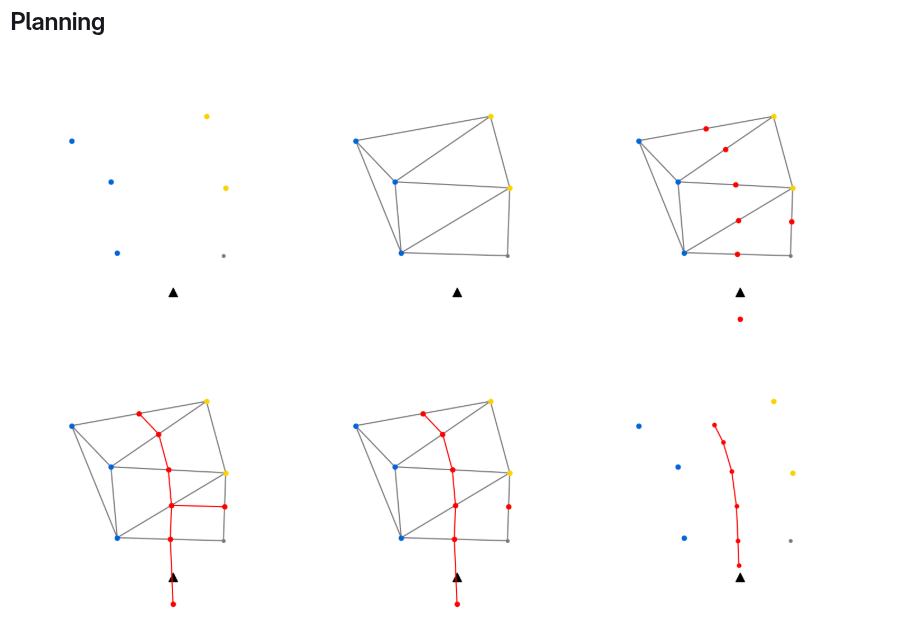
Mapeamento (Mapping)
Divisão responsável por planejar a rota que o veículo irá percorrer, utilizando os pontos chaves obtidos pela percepção. Através do processo de SLAM (Localização e Mapeamento Simultâneo), o sistema refina os dados de sensores como GPS/GNSS e IMU para construir o mapa da pista enquanto determina a localização exata do carro dentro dela. A rota é estruturada por meio de algoritmos de Triangulação de Delaunay e Árvore Geradora Mínima para definir o traçado mais provável.
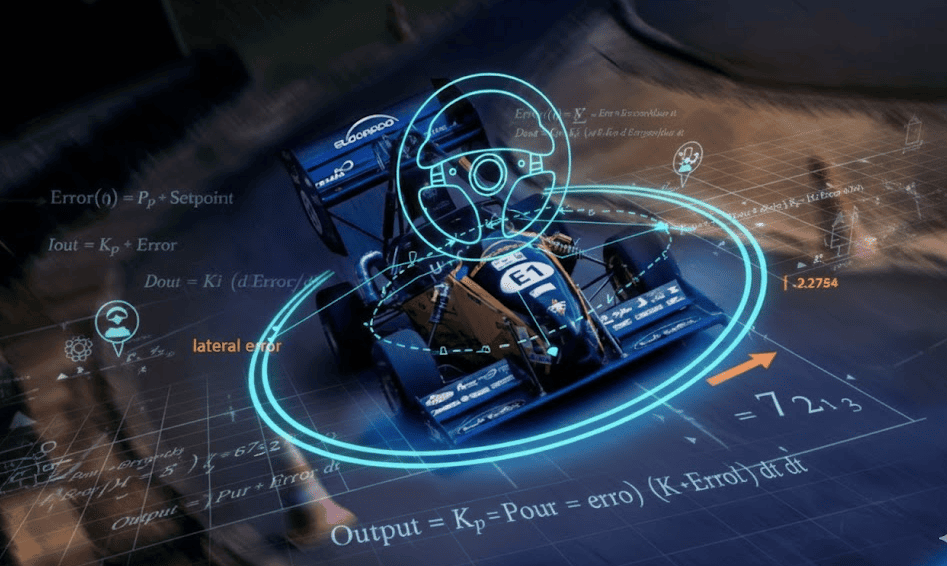
Controle (Control)
Recebendo a rota traçada pelo mapeamento, a divisão de controle guia o carro de forma precisa para seguir o caminho, otimizando a velocidade e a precisão das manobras. O sistema utiliza o Algoritmo de Stanley e a Geometria de Ackermann para calcular o ângulo de esterçamento ideal, além de um Controle PID para gerenciar a aceleração e frenagem com base no raio das curvas. O processamento central de todos esses cálculos é realizado por uma Jetson AGX Xavier.
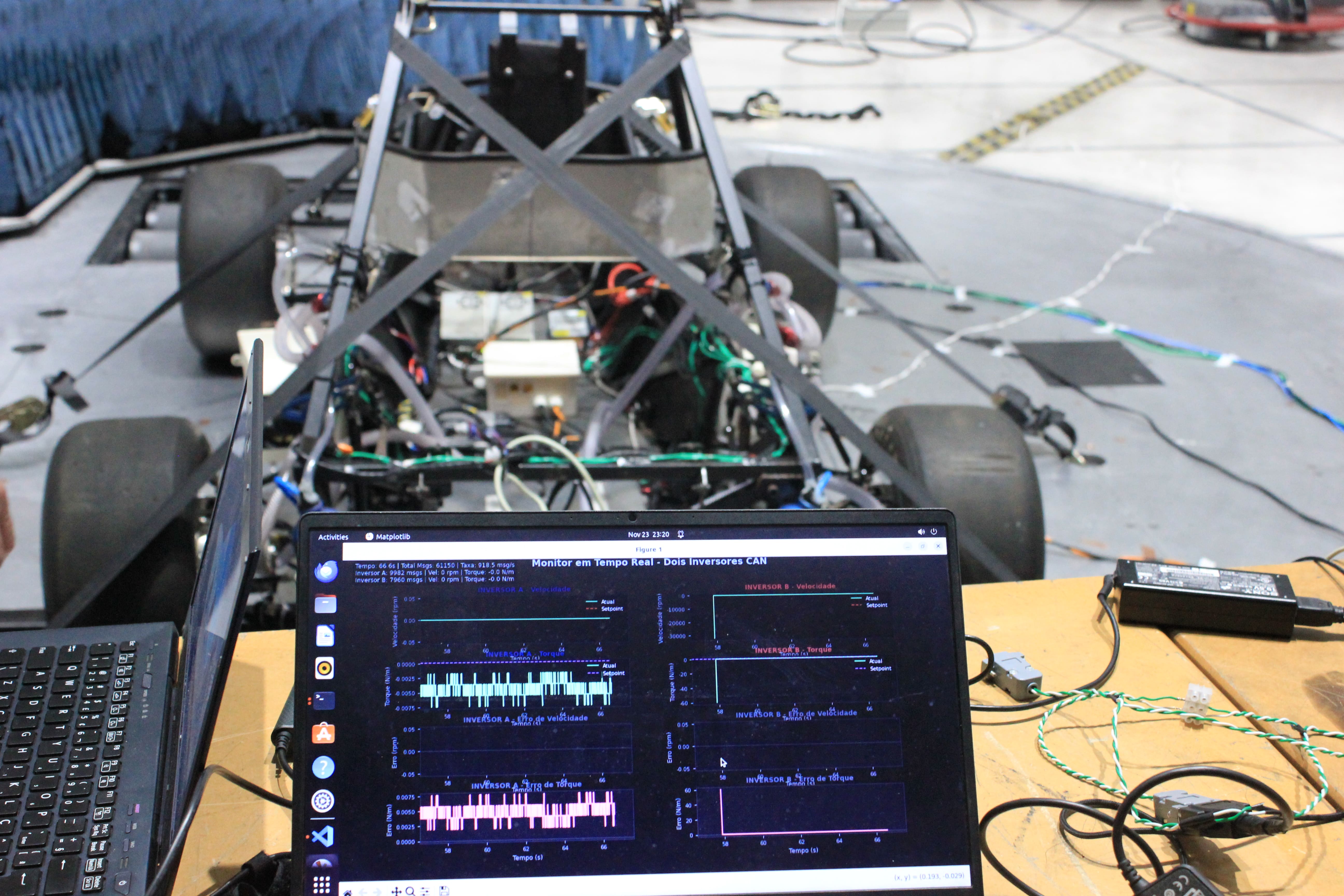
Telemetria (Telemetry)
Responsável por enviar os dados do veículo para o meio externo, permitindo a visualização de métricas críticas que garantem a segurança e o desempenho do protótipo. A arquitetura utiliza protocolos como UDP, WebSocket e CAN Bus para transmitir informações em tempo real do carro para o box. Os dados são gerenciados por um backend em Docker com Redis e exibidos em dashboards no Grafana, possibilitando monitoramento e alertas imediatos.